
Содержание:
- Применяемые технологии
- Выходной сигнал
- Основные параметры
- Когда применяют инкрементальные энкодеры
- Области применения
Применяемые технологии
Работа современных энкодеров базируется на использовании определенных физических принципов, основными из которых являются магнитный, ёмкостной и оптический. Для определения положения объекта ёмкостной принцип предполагает использование изменений электрического поля, магнитный – изменений магнитного поля, оптический – изменений пучков света.

Оптические
Оптические датчики угла поворота используют изменения световых пучков, происходящие во время кругового движения кодового диска, с которым взаимодействуют пучки света. Работа оптических энкодеров основана на двух схемах: пропускательной и отражательной. В случае пропускательной схемы световые пучки попадают на фотоприемники после прохождения через узкие отверстия в кодовом диске. При отражательной схеме на кодовом диске происходит чередование зеркальных и рассеивающих участков. Отражающийся от зеркальных участков свет, попадает в приёмник оптического излучения.
Кодовый диск инкрементного энкодера (слева) и абсолютного энкодера (справа)
Магнитные
Магнитные энкодеры для работы используют изменения магнитного поля, которые происходят во время кругового движения кодового диска. В зависимости от способа измерения изменений, магнитные датчики углов поворота делятся на следующие виды:- индуктивные – изменения, происходящие с магнитным полем, измеряются по изменениям взаимной индуктивности обмоток, находящихся на неподвижной и вращающейся части энкодера;
- магнитно-резистивные – в таких датчиках в качестве чувствительного элемента используются материалы, которые в магнитном поле изменяют свое сопротивление;
- на датчиках Холла – изменения магнитного поля оцениваются с помощью датчиков на эффекте Холла.
Ёмкостные
Принцип действия базируется на оценке изменений электрического поля, которые происходят при круговом движении кодового диска специальной конфигурации. Изменения емкости конденсатора, образованные вращающимся кодовым диском и обкладками на неподвижной части энкодера, является основанием для оценки электрического поля.Выходной сигнал
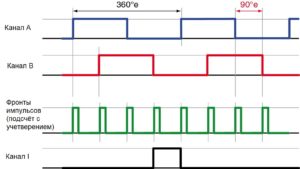
Выходной сигнал инкрементального энкодера чаще всего представляет собой 2 импульсных сигнала со скважностью 50% сдвинутых относительно друг друга на 90°. Сигналы с этих двух каналов (квадратура выхода (обычно A и B)) позволяют определить направление вращения энкодера и величину углового перемещения. Направление вращения определяется опережением или отставанием импульсов одного из каналов относительно второго канала. Величина перемещения определяется по количеству импульсов на этих двух каналах. Для обработки выходного сигнала применяются специализированные счётчики импульсов, либо отдельно стоящие либо интегрированные в микропроцессоры , микроконтроллеры или ПЛК. В зависимости от способа обработки сигнала с энкодера можно получать информацию о положении или о скорости. Такая гибкость позволяет широко применять энкодеры в современных системах автоматического управления в качестве датчиков обратной связи по обоим этим величинам. В ряде случаев энкодер оснащается третьим каналом – индексным (обозначают I или Z). Импульс на нём появляется один раз за полный оборот энкодера. Этот импульс позволяет контролировать показания с каналов A и B, а также облегчает привязку показаний инкрементального энкодера к реальному положению механизма.Основные параметры
Разрешение
Разрешение инкрементального энкодера определяет какое минимальное перемещение вала датчика приводит к изменению сигнала на выходе датчика. У всех инкрементальных энкодеров разрешение приводится в полных циклах на один оборот. Под одним полным циклом подразумевается полный цикл измерения сигналов на двух основных каналах энкодера (A и B). При обработке сигнала инкрементального энкодера часто пользуются подсчётом импульсов «с учетверением». В этом случае подсчитывается каждый фронт (передний и задний) по обоим основным каналам энкодера A и B. Легко видеть что за время полного цикла таких фронтов будет 4 – 2 по каналу A и 2 по каналу B. Таким образом при такой обработке количество отсчётов на один оборот энкодера будет в 4 раза больше чем разрешение указанное в полных циклах.
Интерфейс
Все инкрементальные энкодеры имеют интерфейс в виде двух импульсных сигналов, а некоторые имеют и дополнительный индексный канал. Отличия могут заключаться в напряжении импульсных сигналов и в наличии дифференциального выхода (драйвера линии). Импульсный сигнал формируемый на выходе инкрементального энкодера принимает 2 значения – максимальное и минимальное. Минимальное значение в большинстве случаев соответствует нулю. Максимальное значение может быть или фиксированным (напр. 3,3 В, 5 В) так и зависеть от напряжения питания поданного на энкодер (например на 1В или на 2 В меньше напряжения питания). По способу формирования выходного сигнала можно выделить энкодеры:- с несимметричным выходом
- с дифференциальным выходом (с драйвером линии).
Скорость вращения
Важным параметром о котором не следует забывать является максимальная скорость вращения при которой происходит корректная выдача выходного сигнала. Именно от него зависит можно ли будет установить инкрементальный энкодер на валу скоростных бесколлекторных двигателей или же его можно будет использовать только на выходе мотор-редукторов и сравнительно медленных моментных двигателей.Когда применяют инкрементальные энкодеры
Вопрос о том какие энкодеры предпочтительней применить в той или иной системе неразрывно связан с требованиями, предъявляемыми к ней. Если сразу после подачи питания на систему датчик должен выдавать правильное положение, то тогда лучше применить абсолютный энкодер. А если после старта допускается период подготовки системы к работе когда можно провести вывод механизма в нулевое положение, то тогда можно применять инкрементальный энкодер. Инкрементные энкодеры имеют более простую конструкцию, поэтому среди них можно найти модели очень компактных размеров, недостижимых для абсолютных датчиков. Этим определяется применение инкрементных энкодеров в малогабаритных системах. Если энкодер используется только для определения скорости вращения механизма, то для выполнения этой функции достаточно инкрементного энкодера.Области применения
Инкрементальные энкодеры являются одним из самых распространённых датчиков в современных сложных технических системах. Вот лишь некоторые примеры:- Медицинская техника
- Автоматизированное тестовое и диагностическое оборудование
- Самодвижущиеся роботоподобные устройства
- Системы контроля доступа