Знания в области современной медицины о строении человеческого тела и процессах внутри него значительно расширились благодаря научно-техническому прогрессу. Приборостроение и робототехника стали широко применяться для решения прикладных задач медицины. Обеспечение точности, скорости и качества множества медицинских исследований и хирургических операций невозможно без использования медицинского оборудования, в составе которого используются современные прецизионные электроприводы.
Электропривод является ключевым электромеханическим изделием в составе хирургических роботов, систем дозированной доставки лекарств, томографов и протезов конечностей.
Основные требования к электроприводам в составе медицинских устройств:
- точность
- надежность
- химическая инертность
- стабильность
- уменьшенные массогабаритные параметры
- уменьшенное тепловыделение
- количество циклов стерилизации
Содержание
- Примеры применения
- Устройства для реабилитации и дополнительной поддержки
- Тактильные устройства
- Хирургические роботы
- Протезы конечностей
- Оборудование для визуализации и диагностики
- Терапевтическое оборудование
- Инсулиновые помпы и насосы для лабораторных исследований
- Микроскопы
ПРИМЕРЫ ПРИМЕНЕНИЯ
Устройства для реабилитации и дополнительной поддержки
Устройства для реабилитации применяются при параличе различной степени, нарушений двигательных функций после инсульта и других травм и заболеваний, вызывающих нарушение работы опорно-двигательного аппарата человека. В реабилитационном роботе, который представляет собой стационарную конструкцию (рисунок 1, а), могут использоваться электроприводы серии Харза-14 с датчиками положения выходного звена и положения ротора электродвигателя.
В нестационарных реабилитационных и поддерживающих экзоскелетах могут применяться как мотор-редукторы, так и прямые приводы (рисунок 1, б).
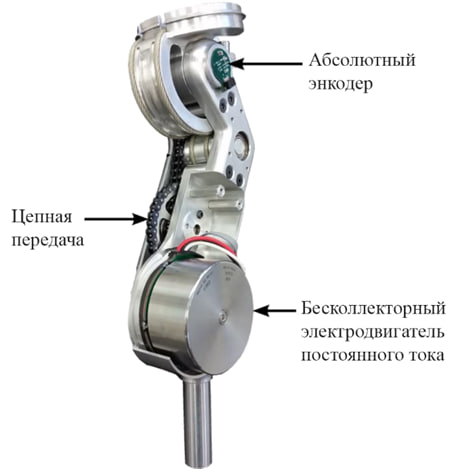
В суставах экзоскелетов (рисунок 1, в) используются электроприводы, состоящие из бесколлекторного электродвигателя постоянного тока, волнового редуктора с большим передаточным отношением и датчиков положения вала. Оптимальным решением для интеграции в подобный экзоскелет могут быть сервоприводы ХАРЗА-ПВ с плоским электродвигателем и волновым редуктором.
 а) а) |
 б) б) |
 в) в) |
Рисунок 1 – Вид реабилитационных экзоскелетов и их устройства: а – стационарного, б – нестационарного, в – вид электропривода в составе экзоскелета
Тактильные устройства
Использование электроприводов в тактильных устройствах (англ. Haptic Devices) необходимо для создания кинестетической (или силовой) обратной связи между дистанционно управляемым устройством (или виртуальным объектом) и оператором. В медицине к таким устройствам относятся различные манипуляторы, обеспечивающие высокоточное управление сложным медицинским оборудованием, например, хирургическими роботами. В тактильных устройствах (рисунок 2, а, б) используются электроприводы на основе коллекторного электродвигателя постоянного тока с диаметром – от 6 до 16 мм, которые работают при номинальном напряжении питания от 4,5 до 8 В. Компактные сервоприводы ГРИЗОН соответствующего диаметра могут легко интегрироваться в подобные устройства.
 а) а) |
 б) б) |
Рисунок 2 – Тактильные устройства: а – упрощенная схема работы тактильного устройства; б – вид устройства Phantom Omni; в – вид устройства LinkTouch
Хирургические роботы
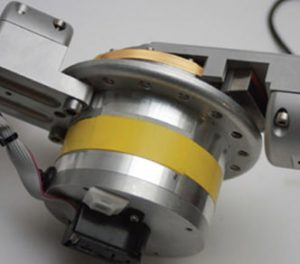
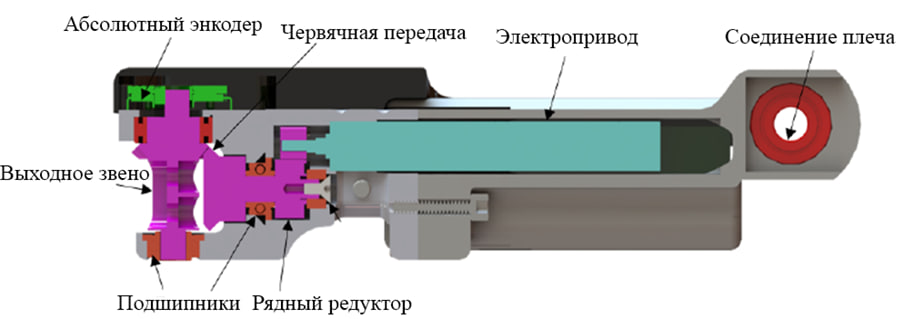
В хирургическом роботе для проведения лапароэндоскопических операций (рисунок 3, а, б), используется набор из электроприводов с бесколлекторным электродвигателем постоянного тока и планетарным редуктором диаметрами 6 и 12 мм. Для контроля работы электродвигателей используются встроенные датчики Холла, а также инкрементные энкодеры с высоким разрешением. Компактные сервоприводы ГРИЗОН на основе бесколлекторных электродвигателей имеют исполнение с возможностью стерилизации, что позволяет применять их в инструментах для хирургических роботов.
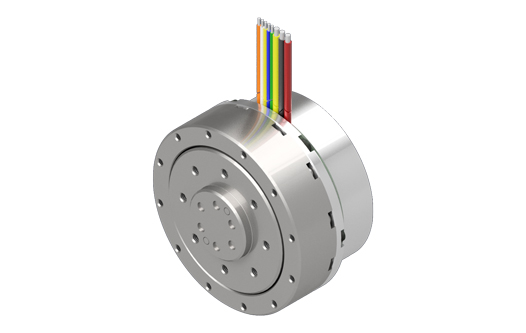
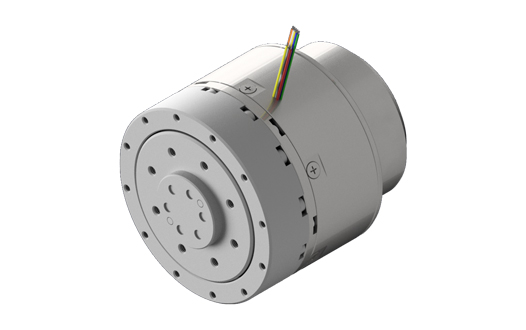
В узлах крупногабаритного хирургического робота (рисунок 3, в), которые несут большую нагрузку и отвечают за позиционирование роботизированных рук относительно хирургического стола, могут использоваться высокоточные сервоприводы ХАРЗА-14.
 а) а) |
 б) б) |
 в) в) |
Рисунок 3 – Вид хирургических роботов: а – робот для лапароэндоскопии; б – конструкция в разрезе плечевого элемента робота для лапароэндоскопии; в – робот da Vinci (США)
Протезы конечностей
Разработка протезов для человеческого тела предъявляет целый ряд требований для электроприводов в их составе: биосовместимость, малые значения массогабаритных параметров, высокое значение крутящего момента и малая потребляемая мощность. Для того, чтобы обеспечить характеристики согласно этим требованиям, в конструкции электроприводов для протезов суставов (рисунок 4, а) используют сразу два редуктора. В качестве приводов суставов для протезов рук или ног целесообразно использовать плоские сервоприводы ХАРЗА серии HSF с волновым редуктором в составе. Также возможна разработка роботизированных суставов на базе плоских бесколлекторных электродвигателей Fulling motor.
Наиболее сложными элементами протезов конечностей являются кисти рук (рисунок 4, б), поскольку приводы в их составе должны быть компактными и выдерживать значительные нагрузки в диапазоне 20 – 140 Н. Для приведения в движение каждого пальца используются компактные бесколлекторные электродвигатели, питающиеся от напряжения постоянного тока 6 В. Например, электродвигатели ГРИЗОН диаметром 8 и 10 мм.
 а) а) |
 б) б) |
Рисунок 4 – Вид протезов конечностей: а – локтевого сустава, б – кисти руки
Оборудование для визуализации и диагностики
К данному классу медицинских устройств относят компьютерные томографы, рентгеновские сканеры и магнитно-резонансные томографы. В этом классе устройств применяются сервоприводы, которые создают большой крутящий момент в сочетании с высокой скоростью вращения выходного вала. Такие требования обусловлены необходимостью вращать массивные конструкции, содержащие большое количество устройств с высокой скоростью. На рисунке 5, а приведена внутренняя конструкция компьютерного томографа.
Для решения подобных задач используются сервоприводы на основе бесколлекторных синхронных электродвигателей (рисунок 5, б). Такие сервоприводы питаются от напряжения переменного тока 480 В и создают крутящий момент – 72,1 Н·м при скорости вращения выходного вала 3000 об/мин.
 а) а) |
 б) б) |
Рисунок 5 – Вид компьютерного томографа в разборе (а) и сервопривода (б)
Терапевтическое оборудование
Терапевтическое медицинское оборудование может включать в себя устройства для лучевой терапии, аппараты искусственной вентиляции легких (ИВЛ), сканирующие лазерные стимуляторы, перистальтические насосы для доставки лекарств и др.
В составе устройств для этой процедуры используются многолепестковые коллиматоры (рис. 6), состоящие из двух блоков металлических пластин. В качестве электропривода в коллиматорах для протонной лучевой терапии может использоваться компактные сервоприводы Гризон малого диаметра в сборке с винтовой передачей, а также решения от компании Constar.
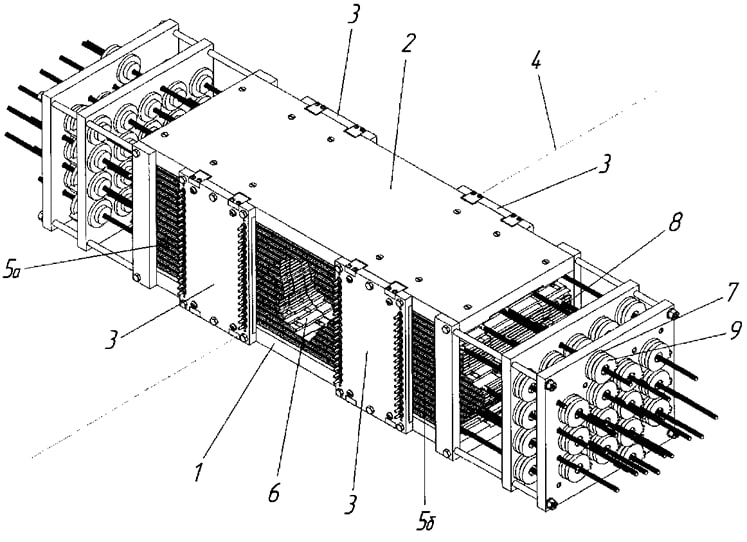
Рисунок 6 – Общий вид многолепесткового коллиматора для протонной лучевой терапии:
1 – основание; 2 – крышка; 3 – боковины; 4 – геометрическая ось; 5а и 5б – блоки из набора пластин; 6 — пластины; 7 – индивидуальные электродвигатели; 8 – индивидуальные винтовые передачи; 9 – энкодеры.
Инсулиновые помпы и насосы для лабораторных исследований
К электроприводам для инсулиновых помп, лабораторных перистальтических насосов и для компактных насосов в портативных системах для диализа крови предъявляются следующие требования: линейность механических характеристик, высокое значение крутящего момента при малых значениях масса-габаритных параметров, уменьшенное тепловыделение, длительный срок службы, малый уровень звукового и электромагнитного шума.
Инсулиновая помпа (рисунок 7, а) может иметь в своем составе электропривод ГРИЗОН на основе бесколлекторного электродвигателя постоянного тока и планетарного трехступенчатого редуктора диаметром от 6 мм до 10 мм со встроенным инкрементным энкодером.
Лабораторные перистальтические насосы (рисунок 7, б) работают преимущественно от бесколлекторных электродвигателей постоянного тока в сочетании с планетарным многоступенчатым редуктором. В таких насосах также могут найти свое применение сервоприводы ГРИЗОН с диаметром редуктора от 32 мм со встроенными датчиками Холла.
 а) а) |
 б) б) |
Рисунок 7 – Вид инсулиновой помпы (а) и перистальтического лабораторного насоса (б)
Микроскопы
Электроприводы применяются как в лабораторных, так и в хирургических микроскопах для фокусировки, осевого перемещения предметного стола или для поворота обоймы с объективами. Наиболее ответственной задачей является манипуляция оптикой для настройки фокуса и масштабирования (перемещения объектива). Для решения этой задачи привод должен обладать точностью позиционирования, близкой к микрометру, плавностью хода, компактностью и как можно меньшим значением инерцией выходного вала. Компактные сервоприводы ГРИЗОН на основе коллекторного электродвигателя постоянного тока диаметром 10 мм c планетарным редуктором и с инкрементным энкодером может использоваться для такого применения (рисунок 8).

Рисунок 8 – Вид 3D-модели хирургического микроскопа
Таким образом, в медицине существует большое количество задач, где невозможно обойтись без электроприводов, отличающихся высокой точностью, энергетической эффективностью, компактными размерами, и большим значением крутящего момента. Перспективными направлениями развития электроприводов для медицины становятся: использование новых материалов и технологий, обеспечивающих возможность рекуперации энергии в протезах и уменьшение тепловыделения; биосовместимость для использования внутри человеческого организма и продление срока службы.
Компания ИнноДрайв предлагает широкий выбор высокоточных приводных решений для медицинского приборостроения. Наши специалисты всегда готовы помочь с выбором необходимого привода или разработать решение по вашему ТЗ.