В статье рассмотрим два типа энкодеров – абсолютный и инкрементальный, а также сравним их между собой.
Содержание
Энкодеры — датчики угла поворота, которые используют в различных сферах промышленности. Их применяют для преобразования подконтрольной величины в электросигнал. В зависимости от принципов и особенностей работы, энкодеры могут быть абсолютными и инкрементальными. Разберемся, в чем отличия инкрементального энкодера от абсолютного и какой выбрать.
Принцип работы и характеристики
Абсолютные

В зависимости от конструкционных особенностей делят на:
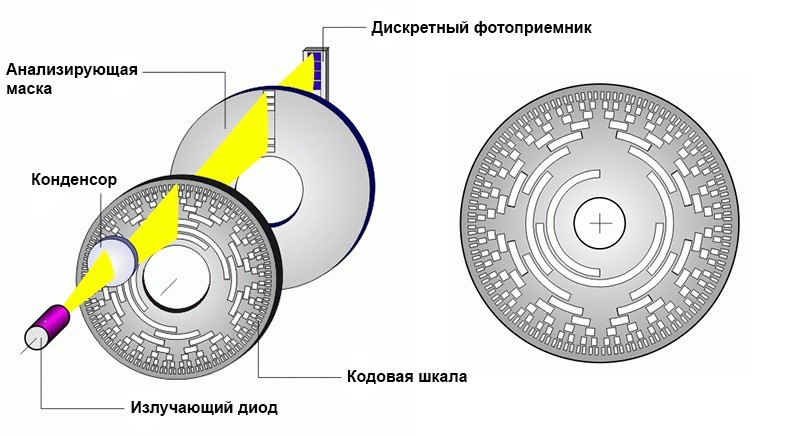
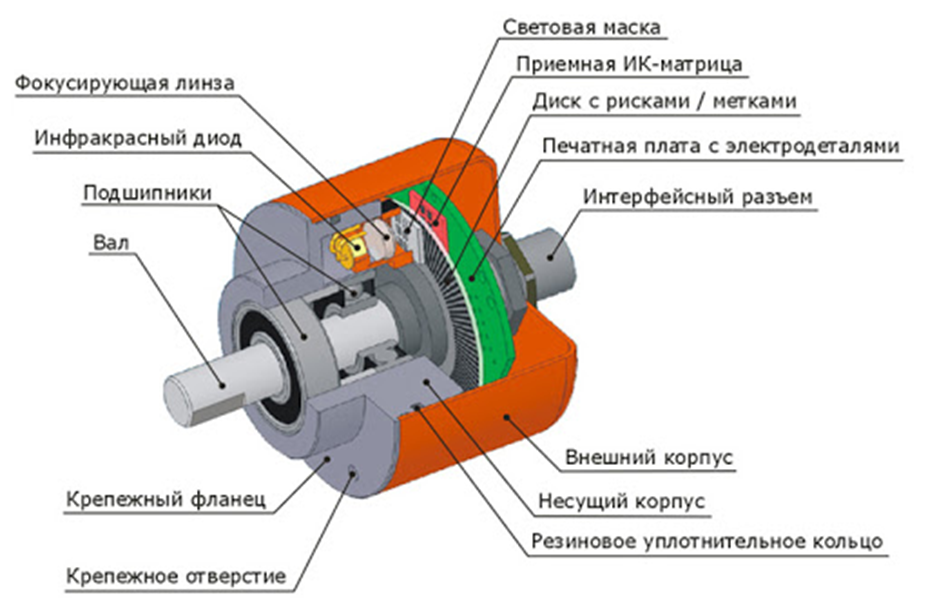
- Оптические. Источником света генерируются сигналы, которые попадают на диск, считываются и преобразуются в электрические импульсы. Обеспечивают этот процесс микросхемы внутри корпуса энкодера.
- Магнитные. Фиксируют изменения магнитного поля, а положение вала формируется датчиком Холла.
- Емкостные. Работа основана на оценке изменений электрического поля, которые формируются при вращении кодового диска (имеет специальную форму). Считывание происходит благодаря изменению емкости конденсаторов на неподвижной части энкодера и вращающихся дисках.
Другая классификация — по назначению. Однооборотные энкодеры предназначены для измерения и определения угла поворота: после вращения регистрируется положение и датчик занимает исходное положение. Многооборотные — фиксируют количество оборотов, поэтому их чаще применяют при линейных измерениях. Получаемый сигнал имеет вид многоразрядного цифрового кода, и для каждого углового значения он уникален. Например, в оптических датчиках для получения информации о положении используют лучи света. Его прохождение фиксируется сквозь прорези диска, появляется логическая «1», если нет — «0». Благодаря такому принципу удается получать данные о положении устройства. Не нужно калибровать и искать нуль-метку (выполнять настройку относительно опорной координаты). Это экономит время и упрощает процесс работы. И это один из главных пунктов, чем отличается абсолютный энкодер от инкрементального.
Инкрементные (пошаговые)
Их главная задача — указать угол поворота механизма. Сколько было сформировано импульсов, таково и значение угла. Соответственно, код положения не формируется, когда вал в статичном положении. Если произойдет перебой с питанием, информация о прошлых перемещениях не сохранится. Кроме того, такие датчики нужно изначально переводить в нуль-точку, только так удается добиться корректных результатов. У энкодеров этого типа простая конструкция, есть компактные модели. Если предстоит работа с малогабаритными механизмами, то выбирают именно инкрементальные. Разница между абсолютными и инкрементальными энкодерами заключается еще и в скорости вращения вала. Последние — оптимальны, если нужно только контролировать скорость вращения. Узнать подробнее о строении и принципах работы энкодеров можно из статьи на нашем сайте.
Где применяются
Абсолютные
Такие приборы используют в сложных технологических системах и отраслях, там, где требуется высокая точность позиционирования:
- в экзоскелетах и протезах;
- автоматизированных системах, которые тестируют и проводят измерения;
- современных станках при производствах;
- робототехнике, в том числе и в медицинских протезах;
- устройствах наведения, оптике и телекоммуникациях.
Инкрементные
Их возможности практически безграничны. Чаще энкодеры используют в системах, предназначенных для контроля доступа, роботизированных механизмах и оборудовании. В целом они применяются в автоматизированном и тестовом оборудовании, робототехнике с функцией самостоятельного движения, системах контроля доступа. Если система подразумевает возможность отложенного старта, а программа — время на подготовку оборудования, вывод механизма в исходное положение, то выбирайте инкрементальные энкодеры.
Преимущества и недостатки
|
|
Абсолютные
|
Инкрементальные
|
|
Фиксация положения
|
да
|
нет
|
|
Нужно задавать нуль-точку (выполнять настройку относительно опорной координаты)
|
нет
|
да
|
|
Постоянный контроль положения
|
да
|
нет
|
|
Масштабирование (работа в условиях растущего объема данных и их обработки)
|
да
|
да
|
|
Возможность сохранения электронных данных
|
да
|
нет
|
|
Цена
|
высокая
|
низкая
|
|
Процесс обработки сигнала на выходе
|
сложный
|
легкий
|
Купить энкодеры можно в ООО «ИнноДрайв». Свяжитесь с нами — менеджеры с инженерным образованием помогут подобрать подходящий вариант исходя из поставленных задач.

 В зависимости от конструкционных особенностей делят на:
В зависимости от конструкционных особенностей делят на:
 Их главная задача — указать угол поворота механизма. Сколько было сформировано импульсов, таково и значение угла. Соответственно, код положения не формируется, когда вал в статичном положении. Если произойдет перебой с питанием, информация о прошлых перемещениях не сохранится. Кроме того, такие датчики нужно изначально переводить в нуль-точку, только так удается добиться корректных результатов. У энкодеров этого типа простая конструкция, есть компактные модели. Если предстоит работа с малогабаритными механизмами, то выбирают именно инкрементальные. Разница между абсолютными и инкрементальными энкодерами заключается еще и в скорости вращения вала. Последние — оптимальны, если нужно только контролировать скорость вращения. Узнать подробнее о строении и принципах работы энкодеров можно из статьи на нашем сайте.
Их главная задача — указать угол поворота механизма. Сколько было сформировано импульсов, таково и значение угла. Соответственно, код положения не формируется, когда вал в статичном положении. Если произойдет перебой с питанием, информация о прошлых перемещениях не сохранится. Кроме того, такие датчики нужно изначально переводить в нуль-точку, только так удается добиться корректных результатов. У энкодеров этого типа простая конструкция, есть компактные модели. Если предстоит работа с малогабаритными механизмами, то выбирают именно инкрементальные. Разница между абсолютными и инкрементальными энкодерами заключается еще и в скорости вращения вала. Последние — оптимальны, если нужно только контролировать скорость вращения. Узнать подробнее о строении и принципах работы энкодеров можно из статьи на нашем сайте.
 Такие приборы используют в сложных технологических системах и отраслях, там, где требуется высокая точность позиционирования:
Такие приборы используют в сложных технологических системах и отраслях, там, где требуется высокая точность позиционирования:
 Их возможности практически безграничны. Чаще энкодеры используют в системах, предназначенных для контроля доступа, роботизированных механизмах и оборудовании. В целом они применяются в автоматизированном и тестовом оборудовании, робототехнике с функцией самостоятельного движения, системах контроля доступа. Если система подразумевает возможность отложенного старта, а программа — время на подготовку оборудования, вывод механизма в исходное положение, то выбирайте инкрементальные энкодеры.
Их возможности практически безграничны. Чаще энкодеры используют в системах, предназначенных для контроля доступа, роботизированных механизмах и оборудовании. В целом они применяются в автоматизированном и тестовом оборудовании, робототехнике с функцией самостоятельного движения, системах контроля доступа. Если система подразумевает возможность отложенного старта, а программа — время на подготовку оборудования, вывод механизма в исходное положение, то выбирайте инкрементальные энкодеры.
